
 「降りやすいところに降りる」から「降りたいところに降りる」時代へ―。宇宙航空研究開発機構(JAXA)は15日、月探査プロジェクトについて報道機関向けの説明会を開いた。月の周回軌道から画像航法を使った月面へのピンポイント着陸、マントルの成分を調べて地球に送信することなどが任務となる。打ち上げは2022年度を予定。探査機の子機に大和市のエクストコム(大和東1)が開発した角度検出センサー「変調波レゾルバ」が搭載される。【2022年3月20日号】
「降りやすいところに降りる」から「降りたいところに降りる」時代へ―。宇宙航空研究開発機構(JAXA)は15日、月探査プロジェクトについて報道機関向けの説明会を開いた。月の周回軌道から画像航法を使った月面へのピンポイント着陸、マントルの成分を調べて地球に送信することなどが任務となる。打ち上げは2022年度を予定。探査機の子機に大和市のエクストコム(大和東1)が開発した角度検出センサー「変調波レゾルバ」が搭載される。【2022年3月20日号】
同プロジェクトチームのプロジェクトマネージャ・坂井真一郎氏によると、精密 なタッチダウンは小惑星探査機「はやぶさ2」の成功例が記憶に新しいが、月のような有重力天体にピンポイント着陸をした例は世界でもまだない。これまでの月着陸機の精度は数㌔~十数㌔程度だとしている。
なタッチダウンは小惑星探査機「はやぶさ2」の成功例が記憶に新しいが、月のような有重力天体にピンポイント着陸をした例は世界でもまだない。これまでの月着陸機の精度は数㌔~十数㌔程度だとしている。
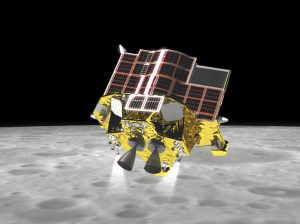
SLIMは高さ2・4㍍、縦約1・7㍍、横約2・7㍍と小型の自動車程度で、乾燥重量200㌔(燃料・酸化剤込みで約700㌔)。軽量な探査機システムを実現し、月や惑星の探査を高頻度化するための検証も行うことが目的。軽量化のため、燃料と酸化剤の一体型タンクを採用し、タンクが探査機の搭載機器などを支える主構造にもなっている。
打ち上げは、同じく宇宙科学研究所で開発している科学衛星ととともにH2Aロケットに相乗りする。長楕円軌道に分離投入後、自身の推進力で月へ向かう軌道変更を行う。エネルギーや消費推薬量を抑える軌道設計を行っており、打ち上げ後、4~6カ月後に月着陸降下を行う見込み。
月周回軌道(15~600㌔)から着陸降下を開始すると、航法カメラによる画像航法を行って高精度に自身の位置を推定しながら、自律的な航法誘導制御で月面上の目標地点に近づく。目標地点上空からは、着陸レーダーによる高度・地面相対速度の精密な計測も開始し、航法誘導に反映。着陸地点上空では画像ベースの障害物検出・回避を自律的に行い、危険な岩などを避けて着陸する。
探査機は、月のマントルと同じ成分を含むと思われる「カンラン石」のそばに着陸し、成分を調査する計画。月のマントル成分と地球の成分とを比較することで、「月は地球から生まれたのか」「まったく異なる成分で誕生して地球の衛星となったのか」を調査する重要な手かがりとなると期待している。
SLIMには2台の子機を搭載する。JAXAが東京農工大や中央大と開発した移動探査ロボット「LEV1」(跳躍移動)、玩具メーカーのタカラトミーなどと共同で開発した同「LEV2」(愛称=ソラキュー)。SLIMやLEⅤ2が撮影した画像をLEⅤ1が地球に送信するなど、連携して月面探査を行う。
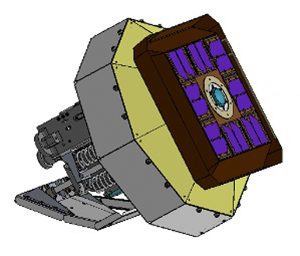 LEV1は、JAXAとの共同開発研究テーマに選定された民間技術などが多岐に渡り採用されている。通常の小型探査ロボットには海外製のアクチュエーターユニットが搭載されるところ、角度センサーにはエクストコム製の変調波レゾルバを使用するなどすべて国産の部品で構成している。
LEV1は、JAXAとの共同開発研究テーマに選定された民間技術などが多岐に渡り採用されている。通常の小型探査ロボットには海外製のアクチュエーターユニットが搭載されるところ、角度センサーにはエクストコム製の変調波レゾルバを使用するなどすべて国産の部品で構成している。
 同社の変調波レゾルバは、探査機のモーターの出力側の角度を検出する役割りで、「小型ながら、真空や高低温(氷点下50度~240度)、放射線など過酷な環境(極限環境)でも作動することが強み」(相模経済新聞2016年8月20日号)。宇宙利用のみでなく民生用として航空機、船舶、自動車、鉄道、半導体製造装置、工作機械など幅広い分野への応用ができる。
同社の変調波レゾルバは、探査機のモーターの出力側の角度を検出する役割りで、「小型ながら、真空や高低温(氷点下50度~240度)、放射線など過酷な環境(極限環境)でも作動することが強み」(相模経済新聞2016年8月20日号)。宇宙利用のみでなく民生用として航空機、船舶、自動車、鉄道、半導体製造装置、工作機械など幅広い分野への応用ができる。









